LaserSnake
Description
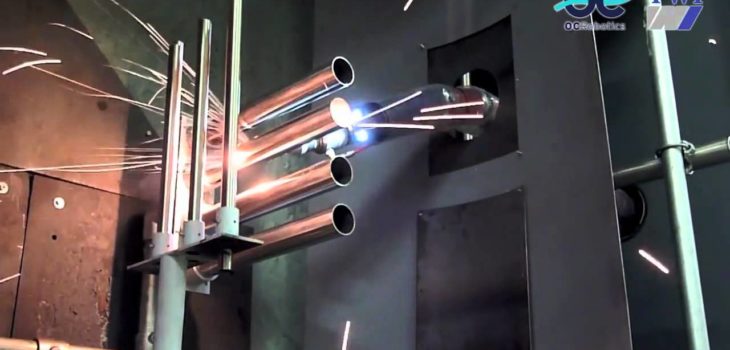
This project was intended to investigate the potential for using a high power cutting laser on a snake-arm robot as an introduction mechanism, for the purpose of nuclear decommissioning. In this project I worked in the development of a C# scripting engine that allowed for scripts to be compiled and executed at runtime to control robot paths. This engine was used to control all paths in this video demonstration.
Key Technologies
C++ | C# | WPF | Networking